This is probably the most iconic of the Sense8/WorldToolKit demos. I think it was developed originally by Dave Hinkle and was often the first application compiled and tested after each update to WTK. As a result, it was ported to almost every hardware platform of the time.
Here are some note from the readme:
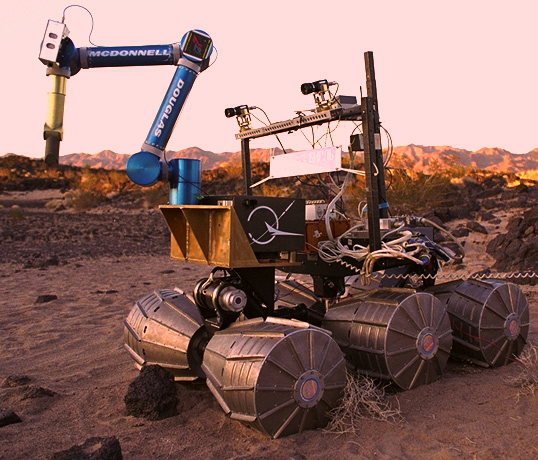
This is a simulation of a proposed mars rover platform. WorldToolKit was used to show problems with this design. The mouse can be used to fly around the terrain without the rover. This simulation was built by NASA and includes the following features: - Terrain following - Hierarchical object attachments - Physically-based motion - Support for head-mounted displays and tracking
(ambient music was added to the YouTube video. The original was silent)
I had to find a somewhat slow modern (2022) machine to capture this demo as the app was not designed to maintain a constant framerate. On my laptop (with three screens) this was running at like 250fps.
Here is the README.1ST file:
To run the rover from this directory do the following. # set model env var to point to the rover parts setenv WTMODELS ./terrnn:./josh # set image env var for textures setenv WTIMAGES ./josh # set the env var to point where the WTKCODE file is setenv WTKCODES ../../ # to start execution type rover The following keys affect the rover motion: f - rover moves forward with all wheels moving b - rover moves backward with all wheels moving s - rover stops q - exit program p - print frame rate r - reset the rover v - half the velocity of the rover V - double the velocity of the rover F1 - starts rover on preprogrammed path Each of the six wheels has three states, forward, backward, and stop to toggle the state of a wheel press 1-6 to change the state of a particular wheel. The wheels are arranged as 1,2, & 3 on one side and 4,5, & 6 on the other. For example to turn the rover, press the 1 key. To continue forward then press the f key. To turn the other way press the 4 key. Fly around the database and press the middle mouse button every once in a while. This will place flags. After you have placed a few flags then press the f key. The rover will go from flag to flag and then to a "goal" The object is to get to the goal without turning over. Have fun
The ROVER.C file make reference to “prior work” from InWorld VR, Inc. From what I can find, they were the manufacturers of the CYBERWAND. Online, I found a reference to a 1994 trademark registration for this “computer peripheral, namely a joystick”. Sadly, I can not find any images of the cyberwand, but also can not see any direct connection to the rover demo other than some timer code.
UPDATE:
After an exchange with Kurt Schwehr and the review of a paper he shared, it seems clear that the ROVER demo was based on the Russian “Marsokhod” rover.
According to Wikipedia:
Prototypes of the Marsokhod rover were taken from Russia to the NASA Ames Research Center, where they were jointly developed by the US and Russia. This led to the development of a 'virtual environment control system', which meant the rover could be controlled remotely via an interface on a PC.
The Players
Christian Bauer – chrisbauer.com – LinkedIn
Laurent Piquet
Ben Disco – may have added the “tracks” (quite innovative at the time)